
")

AKAM uses different class of ROVs (Remotely Operational Underwater Vehicle).
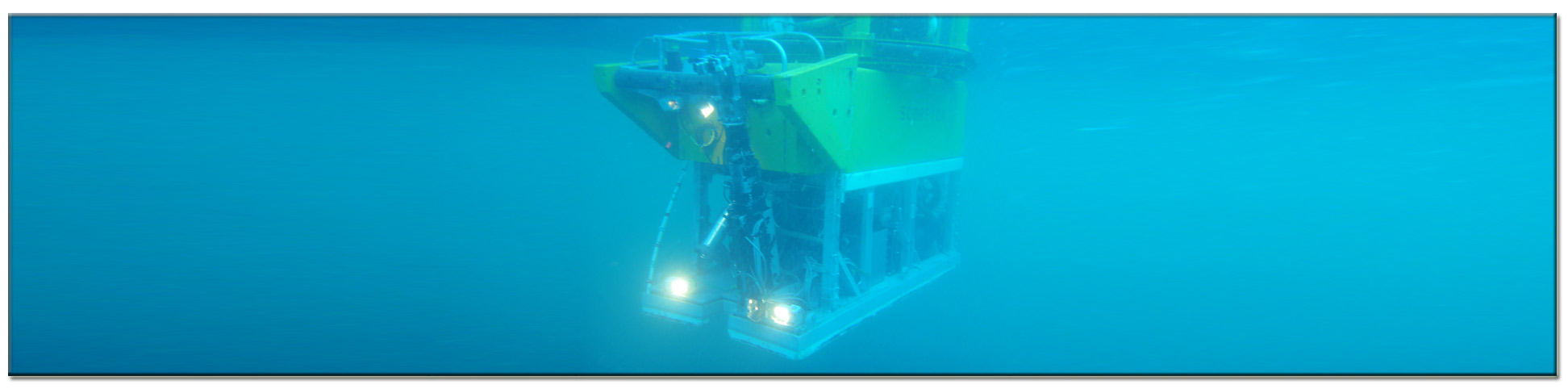
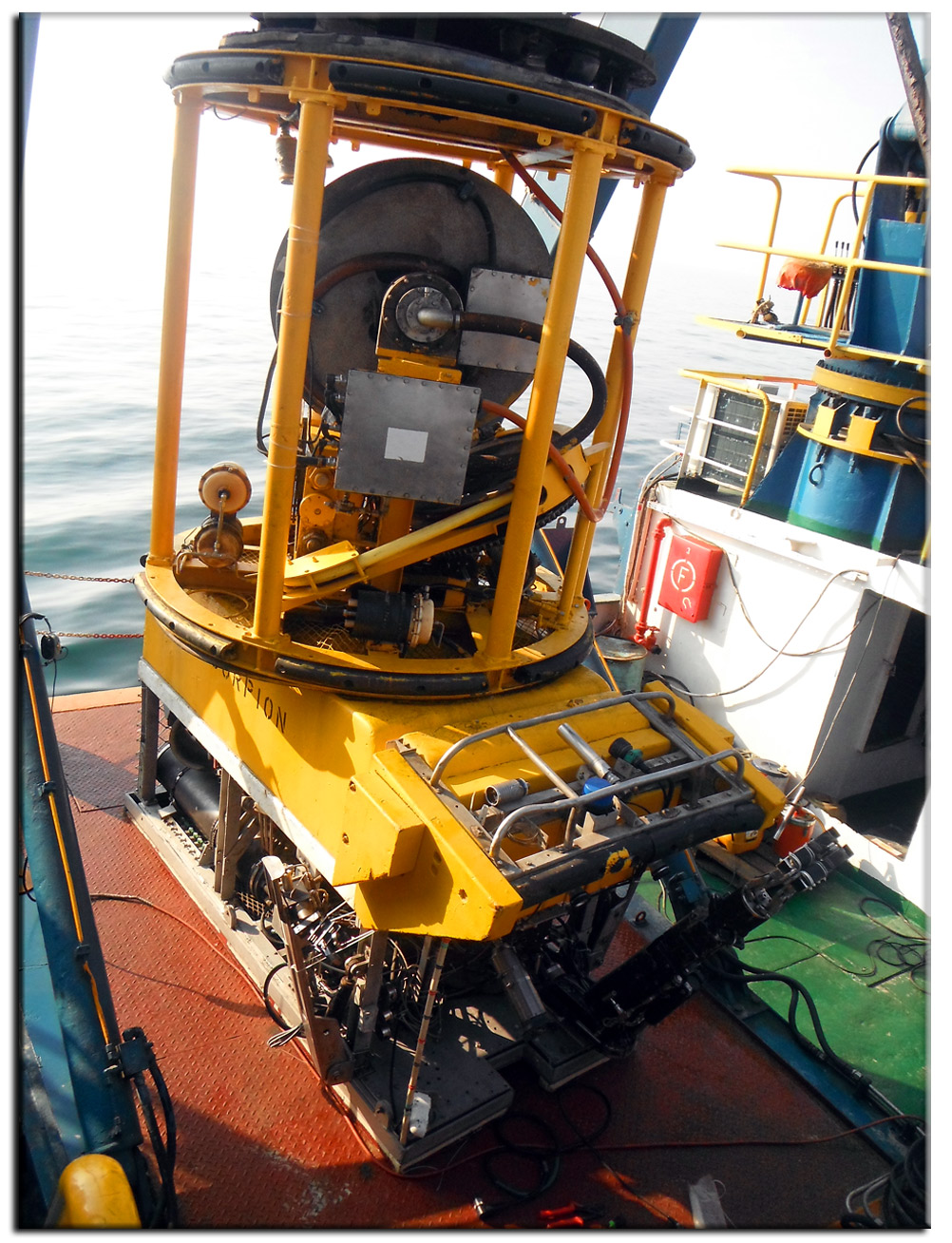
We use different class of ROVs for under water inspection, touchdown monitoring, pipeline and cable tracing and leakage detection, free span correction, cathodic protection and etc for pipe or cable laying operations. Our ROV systems carry out many tasks for oil & gas industry like observation, survey, pipelay support, light to medium works, NDT inspections at depth rating proper for Persian Gulf and Oman Sea. Our specialized vessel is mobilized with SCORPION 23 work class ROV, with Tether Management System (TMS), Launch and Recovery System (LARS) and is supported by visual soft system. This technology enables to capture video direct through the ROV mounted cameras, continuous real time display of the video images and simultaneous playback of all events on any cameras. We have had three different classes of ROVs that enables us to carry out all kind of underwater inspections and repairing services such as: |
||||||||||||||||||||||||
|
 |
|||||||||||||||||||||||


